目次
第1章 電子工作の高機能化
1-0 リアルタイム制御と高機能性の両立
1-1 Raspberry Piとは
1-2 Raspberry Piで何ができるか
1-3 ラズパイを高機能部品として使う
第2章 ラズパイの準備
2-1 ハードウェアとソフトウェアの準備
- 2-1-1 ハードウェアの準備
- 2-1-2 必須ソフトウェアの準備
2-2 OSのインストール
- 2-2-1 Rasbianのインストール
- 2-2-2 Wi-Fi の接続
2-3 OSインストール後の追加作業
- 2-3-1 OSの更新作業
- 2-3-2 日本語化の作業
- 2-3-3 リモートデスクトップ化
2-4 必須のシェルコマンドと使い方
- 2-4-1 ターミナルの起動とプロンプト
- 2-4-2 ディレクトリを扱うコマンド
- 2-4-3 システム制御コマンド
- 2-4-4 アプリケーションインストール関連コマンド
コラム コマンド入力の便利技
第3章 汎用テストボードの製作
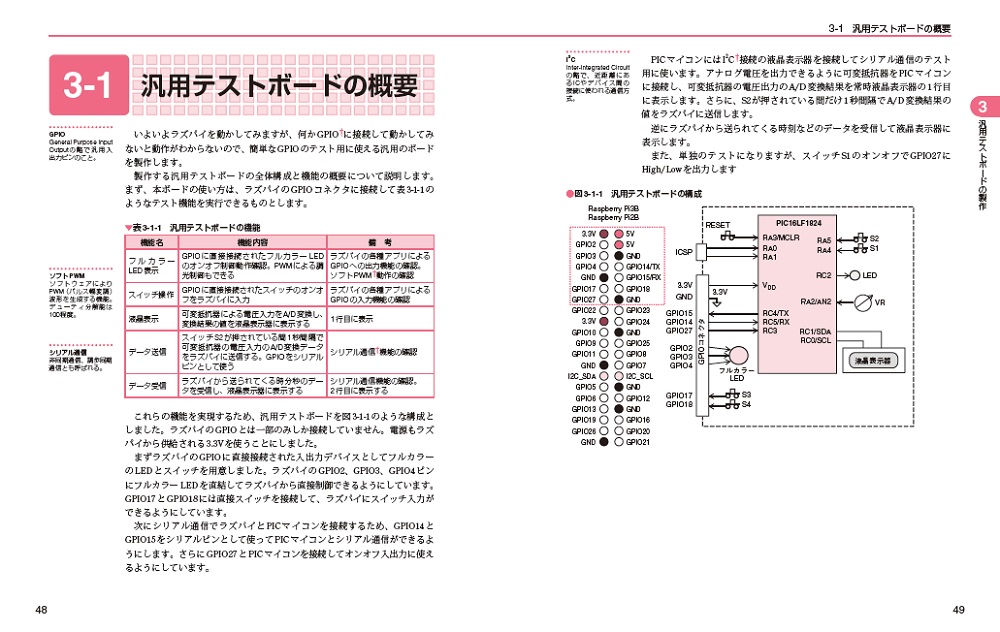
3-1 汎用テストボードの概要
3-2 汎用テストボードのハードウェアの製作
- 3-2-1 液晶表示器の使い方
- 3-2-2 回路設計と組み立て
3-3 汎用テストボードのプログラムの製作
- 3-3-1 全体の構成
- 3-3-2 MCCによるプログラム自動生成
- 3-3-3 液晶表示器ライブラリの使い方
- 3-3-4 プログラム詳細
- 3-3-5 動作確認
コラム MPLAB Code Configurator(MCC)とは
第4章 ラズパイのGPIOの使い方
4-1 ラズパイのGPIOの使い方の種類
4-2 RPi.GPIOモジュールの使い方
- 4-2-1 初期設定と使い方
- 4-2-2 実際の使用例
4-3 Wiring Piライブラリの使い方
- 4-3-1 WiringPi の入手とインストール
- 4-3-2 WiringPi の使い方
- 4-3-3 WiringPi を使ったC言語プログラム例
- 4-3-4 GPIOコマンドユーティリティ
4-4 WebIOPiアプリケーションの使い方
- 4-4-1 WebIOPiの概要
- 4-4-2 WebIOPiのインストール
- 4-4-3 WebIOPiの基本の使い方
- 4-4-4 WebIOPiからGPIOを自由に使う
- 4-4-5 JavaScript ライブラリ
- 4-4-6 基本のボタンの例題
- 4-4-7 マクロ関数呼び出し付きボタンの例題
- 4-4-8 スライダを使った例題
4-5 ラズパイのシリアル通信の使い方
- 4-5-1 ラズパイのシリアル通信を有効化する
- 4-5-2 PySerial モジュールの使い方
- 4-5-3 USBでシリアル通信をする方法
コラム USBメモリの使い方
第5章 おしゃべり時計の製作
5-1 おしゃべり時計の概要
- 5-1-1 全体構成
- 5-1-2 インターフェース
5-2 ラズパイのプログラム製作
- 5-2-1 全体構成
- 5-2-2 テキスト読み上げアプリ「AquesTalkPi」の使い方
- 5-2-3 おしゃべり時計のPythonスクリプト製作
- 5-2-4 自動起動
5-3 時計制御ボードのハードウェアの製作
- 5-3-1 全体構成
- 5-3-2 ドップラセンサの使い方
- 5-3-3 7セグメントLEDの使い方
- 5-3-4 回路設計と組み立て
- 5-3-5 パネルの組み立て
5-4 時計制御ボードのプログラムの製作
- 5-4-1 プログラム全体構成と全体フロー
- 5-4-2 プログラム詳細
5-5 動作確認と調整方法
5-6 グレードアップ天気予報を追加する
コラム Pythonのsubprocessの使い方
第6章 赤外線リモコン付きインターネットラジオの製作
6-1 インターネットラジオの概要
- 6-1-1 全体構成と機能概要
6-2 ラズパイのプログラム製作
- 6-2-1 MPDとMPC
- 6-2-2 MPDとMPCの使い方
- 6-2-3 リモコン対応のPythonプログラム製作
- 6-2-4 自動起動させる
6-3 ラジオ局の登録方法
- 6-3-1 局リストの作り方
6-4 ラジオ制御ボードのハードウェアの製作
- 6-4-1 ラジオ制御ボードの全体構成
- 6-4-2 液晶表示器の使い方
- 6-4-3 赤外線通信の使い方
- 6-4-4 回路設計と組み立て
- 6-4-5 パネルの組み立て
6-5 ラジオ制御ボードのプログラムの製作
- 6-5-1 プログラム全体構成とフロー
- 6-5-2 液晶表示器の使い方
- 6-5-3 プログラム詳細
6-6 動作確認
第7章 データロガーの製作
7-1 データロガーの概要
- 7-1-1 データロガーの概要と機能仕様
7-2 ラズパイのプログラム製作
- 7-2-1 プログラム全体構成
- 7-2-2 matplotlib とは
- 7-2-3 基本的なグラフの描画方法
- 7-2-4 時間軸でグラフを作成する方法
- 7-2-5 データロガーのグラフを作成する
- 7-2-6 一定間隔でデータを収集する
7-3 超簡単ウェブサーバ構築 SimpleHTTPServer
- 7-3-1 SimpleHTTPServerの使い方
- 7-3-2 データロガーシステムとして構成する
7-4 データ収集ボードのハードウェアの製作
- 7-4-1 全体構成
- 7-4-2 デルタシグマA/Dコンバータの使い方
- 7-4-3 複合センサ BME280の使い方
- 7-4-4 回路図作成と組み立て
- 7-4-5 パネルの組み立て
7-5 データ収集ボードのプログラムの製作
- 7-5-1 プログラム全体構成
- 7-5-2 プログラム詳細
7-6 動作確認とデータ収集例
- 7-6-1 基本動作の確認
- 7-6-2 ログデータ例
7-7 グレードアップ
- 7-7-1 外部ネットワークからアクセスできるようにする
- 7-7-2 シャットダウン機能の追加
コラム crontabコマンドの使い方
第8章 リモコンカメラの製作
8-1 リモコンカメラの概要
- 8-1-1 システム構成
8-2 ラズパイのプログラムの製作
- 8-2-1 プログラム全体構成
- 8-2-2 カメラの使い方
- 8-2-3 ストリーミングアプリの使い方
- 8-2-4 リモコンカメラのページの製作
8-3 サーボ制御ボードのハードウェアの製作
- 8-3-1 全体構成
- 8-3-2 RCサーボの使い方
- 8-3-3 回路設計と組み立て
8-4 サーボ制御ボードのプログラムの製作
- 8-4-1 プログラムの全体構成とフロー
- 8-4-2 MCCを使ったプログラム開発手順
- 8-4-3 プログラム詳細
8-5 動作確認
8-6 グレードアップ
- 8-6-1 外部ネットワークからアクセスできるようにする
- 8-6-2 シャットダウン機能の追加
第9章 リモコンカーの製作
9-1 リモコンカーの概要と全体構成
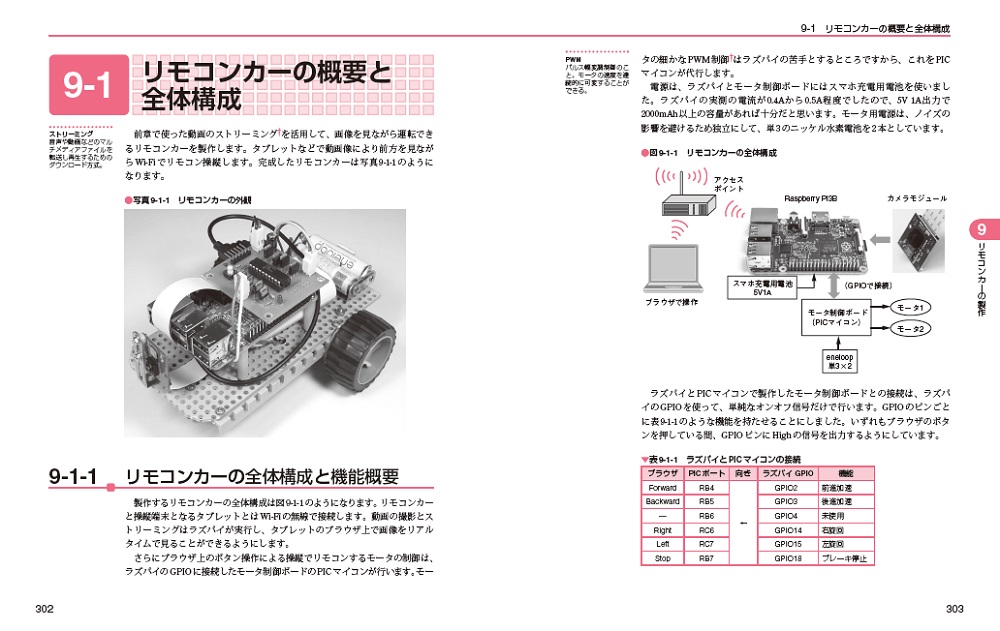
- 9-1-1 リモコンカーの全体構成と機能概要
9-2 ラズパイのプログラム製作
- 9-2-1 プログラム全体構成
- 9-2-2 リモコンカーの操縦用画面の製作
9-3 リモコンカーのハードウェアの製作
- 9-3-1 リモコンカーの車体の製作
- 9-3-2 モータ制御ボードの製作
- 9-3-3 DCモータの使い方
- 9-3-4 回路設計と組み立て
9-4 モータ制御ボードのプログラムの製作
- 9-4-1 プログラム全体構成
- 9-4-2 プログラムの詳細
9-5 動作確認
付録A Linux超入門
A-1 Linuxとは
- A-1-1 Linuxとは何者?
- A-1-2 ラズパイ用Linux
A-2 Linuxの全体構成と機能
- A-2-1 Linux の全体構成
- A-2-2 Linux の起動時の動作
- A-2-3 カーネルの機能
A-3 Linuxのディレクトリ
- A-3-1 動かし方の種類
- A-3-2 Linux のディレクトリ構造とパスの概念
- A-3-3 Linux の管理者権限
- A-3-4 ディレクトリの詳細
A-4 シェルスクリプト
付録B Python超入門
B-1 Pythonに関する常識
B-2 Pythonの基本文法
B-3 データ構造 リストとディクショナリ
B-4 制御文の使い方
付録C MPLAB X IDEの使い方
- C-1-1 MPLAB X IDEのインストール
- C-1-2 MPLAB X IDEの起動
- C-1-3 プロジェクトの作成
- C-1-4 コンパイルと書き込み