サポート
ダウンロード
拡張コネクタガイドについて
本書の「拡張コネクタガイド」をダウンロードできます。解凍してできたPDFファイルを「実際のサイズ」で印刷してご利用ください。
- ダウンロード
- connectorguide.zip(約1.7MB)
サンプルコードについて
本書のサンプルソースがダウンロードできます。解凍してできたファイルをMyAppフォルダに配置してご利用ください。
- ダウンロード
- MyApp.zip(約36KB)
補足情報
次のWebサイトでも補足情報や自走ロボットの動画などをご確認いただけます。
正誤表
本書の以下の部分に誤りがありました。ここに訂正するとともに,ご迷惑をおかけしたことを深くお詫び申し上げます。
P.139 本文の上から3行目
| 誤 |
設定ファイル「condig.txt」を
|
|---|
| 正 |
設定ファイル「config.txt」を
|
|---|
P.69 上部のコマンド実行例
3行目の「$ mkdir /tmp」は不要です。
P.70 表3-4
4列目の「pwmWrite( int pin, int value);」と説明文は,表3-3と重複するため不要です。
P.93 本文の下から1行目
| 誤 |
0番を左側から振ります。
|
|---|
| 正 |
0番を右側から振ります。
|
|---|
P.103 本文の下から2行目
説明はRaspberry Pi 3/3B+のものです。Pi 4Bでは,WiringPiのバージョン2.52においてpullUpDnContol関数が無効です。そのため,タクタイルスイッチ回路の抵抗(3.3kΩ)は必要となります。
P.120 本文の下から5行目
| 誤 |
パルスオンの時間が周期Tに対して2割の場合、
|
|---|
| 正 |
パルスオンの時間が周期Tpwmに対して2割の場合、
|
|---|
P.135 表7-2の名称「熱容量が大きいこて先」の参考品
| 誤 |
白光 TC34-C3
|
|---|
| 正 |
白光 T34-C3/3C型
|
|---|
P.140 本文の下から13行目
P.147 リスト7-2枠下の説明②
3番目の箇条書き(g_dispCharsの説明)は不要です。
P.198 本文の下から3行目
| 誤 |
V1からイメージセンサ部品が変更され、500万~800万画素になり、
|
|---|
| 正 |
イメージセンサ部品が変更され、V1の500万画素から800万画素になり、
|
|---|
P.204 下から2つ目のコマンド実行
| 誤 |
$ raspistill -o `date '+%Y%m%d-%H%M%S'`.jpg t 100
|
|---|
| 正 |
$ raspistill -o `date '+%Y%m%d-%H%M%S'`.jpg –t 100
|
|---|
P.205 下から1つ目のコマンド実行
| 誤 |
$ raspivid t 10000 -o video2.h264 w 640 h 480 fps 15
|
|---|
| 正 |
$ raspivid –t 10000 -o video2.h264 –w 640 –h 480 –fps 15
|
|---|
P.211 表10-2の名称「LCD」の説明
| 誤 |
AQM1602。Chapter 8のLCDを使用します。
|
|---|
| 正 |
AQM1602。Chapter 7のLCDを使用します。
|
|---|
P.211 表10-2の名称「ピンヘッダ」の説明
| 誤 |
RCサーボモータ用の4ピンにカットします。
|
|---|
| 正 |
RCサーボモータ用の3ピンにカットします。
|
|---|
P.212 表10-3の名称「カメラモジュール」の説明
| 誤 |
Chapter 11のカメラを使用
|
|---|
| 正 |
Chapter 9のカメラを使用
|
|---|
P.213 表10-5の名称「熱容量が大きいこて先」の参考品
| 誤 |
白光 TC34-C3
|
|---|
| 正 |
白光 T34-C3/3C型
|
|---|
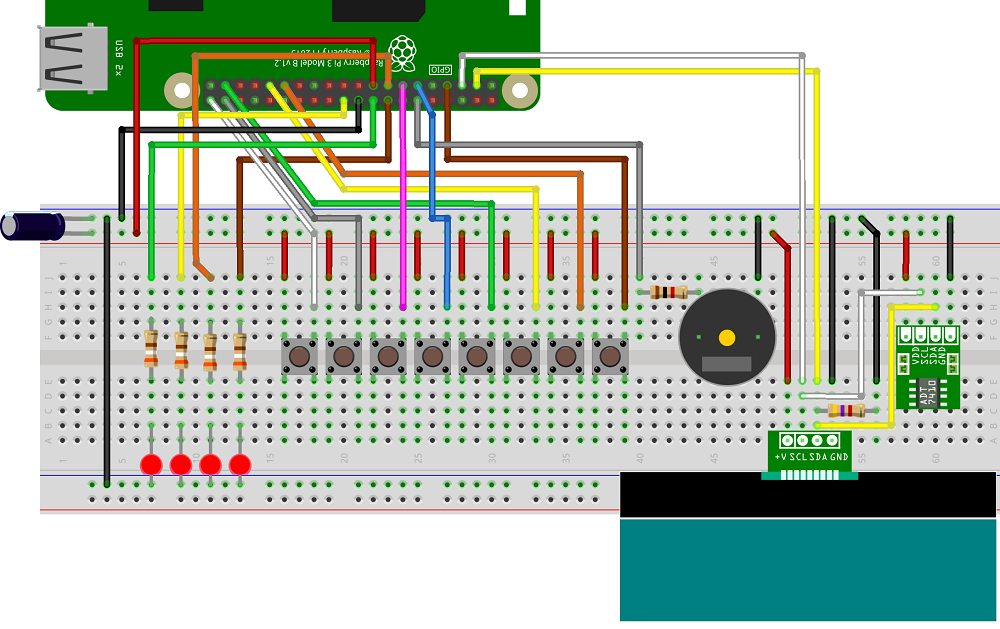
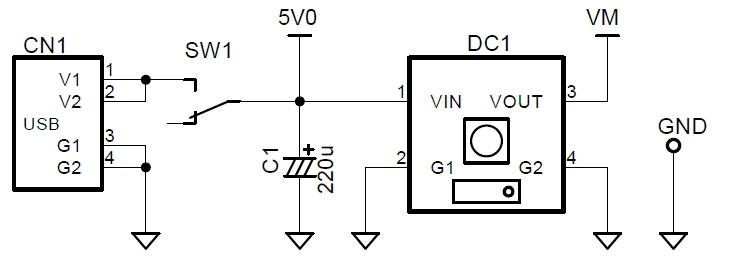
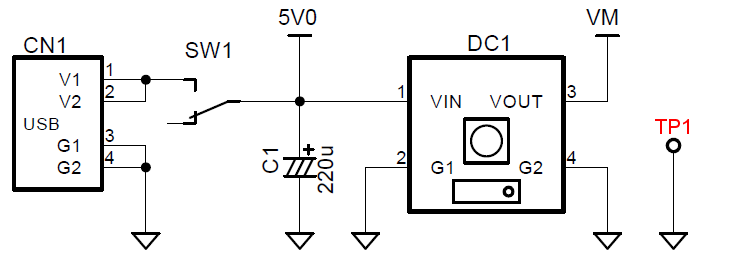
P.228 図10-22
図中の次の部分が間違っておりました。
| 誤 |
|
|---|
| 正 |
|
|---|
P.232 本文の5~6行目
| 誤 |
RCサーボモータ用のJP1の5Vは、
|
|---|
| 正 |
RCサーボモータ用のCN7の5Vは、
|
|---|
P.251 本文の2~3行目
ネットワーク上に対象のラズパイを見つけると認証のダイアログが表示されます。なお,Pi 4Bの場合,Pi 4Bとディスプレイを接続した状態で,PCのVNC Viewerを起動してください。VNCと接続後に,Pi 4Bからディスプレイケーブルを外してください。
P.334 図7-18
| 誤 |
R1のカラーコード1kΩ
|
|---|
| 正 |
R1のカラーコード4.7kΩ
|
|---|
P.335 図7-23
| 誤 |
R1のカラーコード1kΩ
|
|---|
| 正 |
R1のカラーコード4.7kΩ
|
|---|
P.89 リスト4-1(つづき)の末尾
| 誤 |
|
|---|
| 正 |
return EXIT_SUCCESS; ――③
}
|
|---|
P.207 リスト9-1 下から4行目
| 誤 |
while(1){
if(digitalRead ……
system("raspistill ……
}
|
|---|
| 正 |
while(1){
if(digitalRead ……
system("raspistill ……
}
}
|
|---|