概要
国内の理工系教育現場におけるプログラミング導入教育では,
こんな方におすすめ
C言語で電子工作をしたい人 C言語によるRaspberry Piの制御方法を知りたい人 菊池達也(きくちたつや) 博士(工学),
東京都出身。職業訓練大学校(電子科卒),
目次
Chapter 1 Raspberry Piの概要
1.1 Raspberry Pi誕生の背景
1.2 Raspberry Piでできること
1.3 Raspberry Piのラインアップ
1.4 Raspberry Piの各部の名称
1.5 拡張コネクタの信号
1.6 GPIOの電気的仕様
Chapter 2 OSのセットアップ
2.1 本章で準備するもの
2.2 Raspberry Pi OSとは
2.3 Raspberry Pi OSのダウンロード
2.4 Raspberry Pi OSのインストール
2.5 シャットダウンの方法
2.6 デスクトップ画面の構成
2.7 ターミナルで使用するコマンド
2.8 日本語入力システムとLibreOfficeのインストール
2.9 Raspberry Piの設定メニュー
Chapter 3 プログラムの開発環境
3.1 本章で準備するもの
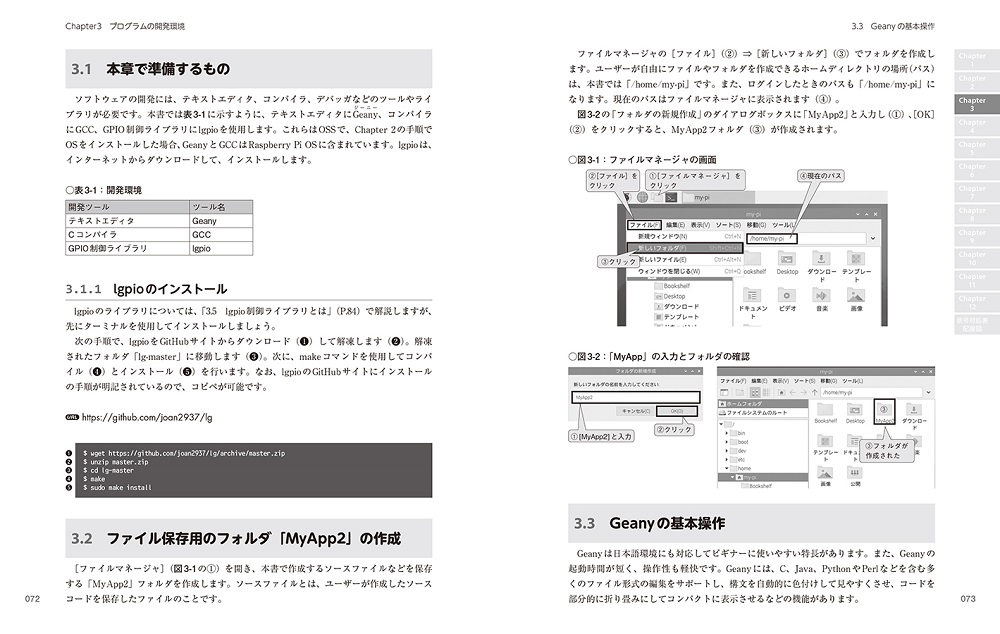
3.2 ファイル保存用のフォルダ「MyApp2」の作成
3.3 Geanyの基本操作
3.4 コンパイラの設定
3.5 lgpio制御ライブラリとは
3.6 数値のデータ型
Chapter 4 GPIOのデジタル出力を使う
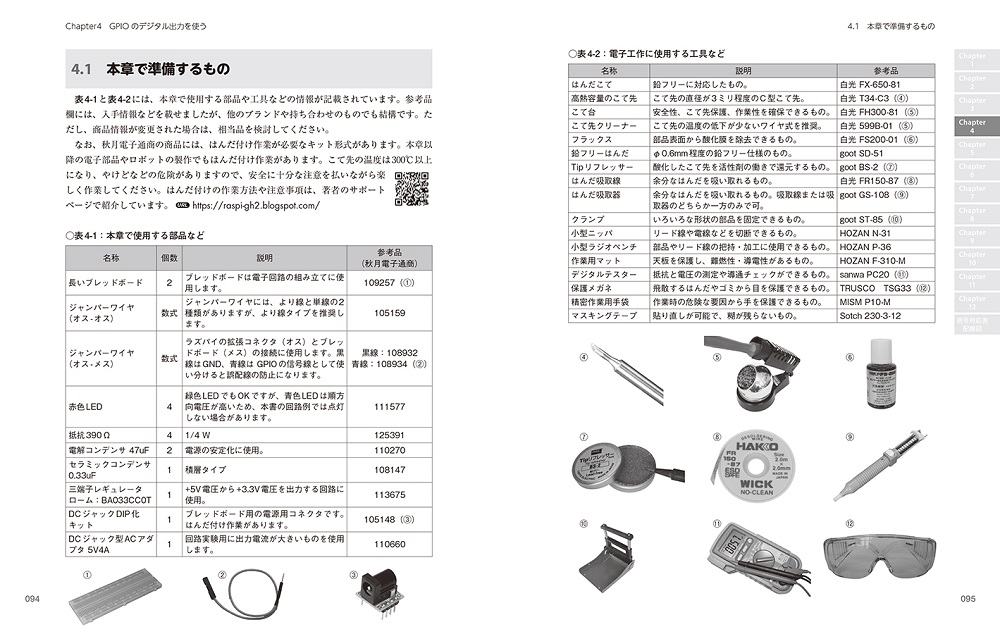
4.1 本章で準備するもの
4.2 LEDとは
4.3 LEDの点灯回路の設計
4.4 ブレッドボードによる試作
4.5 LEDを点滅させる
4.6 バイナリーカウンタの値をLEDに表示させる
Chapter 5 GPIOのデジタル入力を使う
5.1 本章で準備するもの
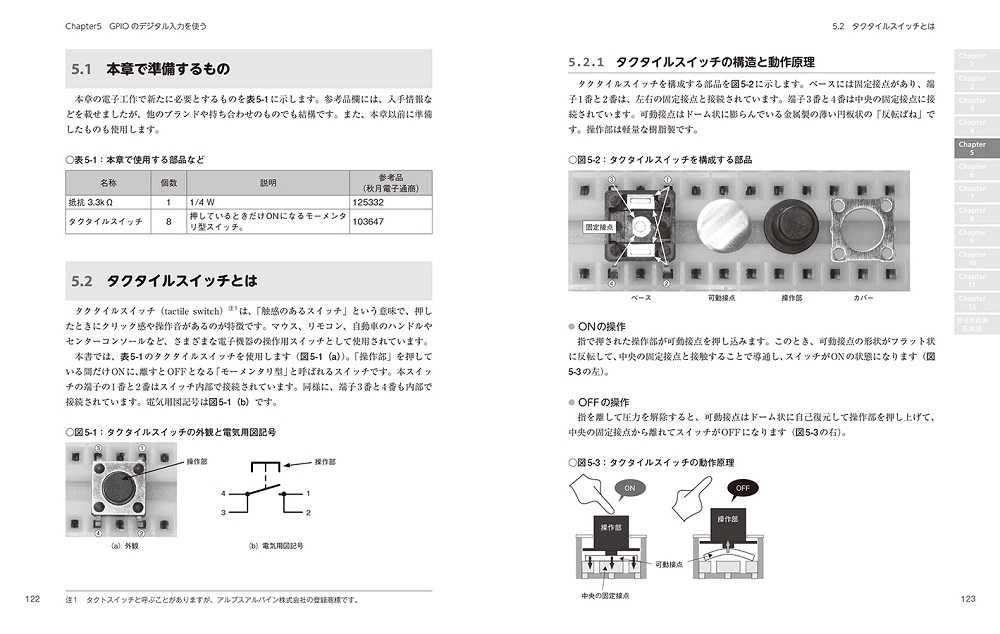
5.2 タクタイルスイッチとは
5.3 タクタイルスイッチでLEDを点灯させる
5.4 GPIOの内部抵抗を使う
5.5 オルタネート動作をさせる
5.6 バウンシングとは
5.7 8個のスイッチの値を一度にリードする
5.8 割込みとは
Chapter 6 パルス出力・PWM出力・タイムスタンプ・スレッドを使う
6.1 本章で準備するもの
6.2 パルス信号とは
6.3 PWM信号とは
6.4 タイムスタンプとは
6.5 スレッドとは
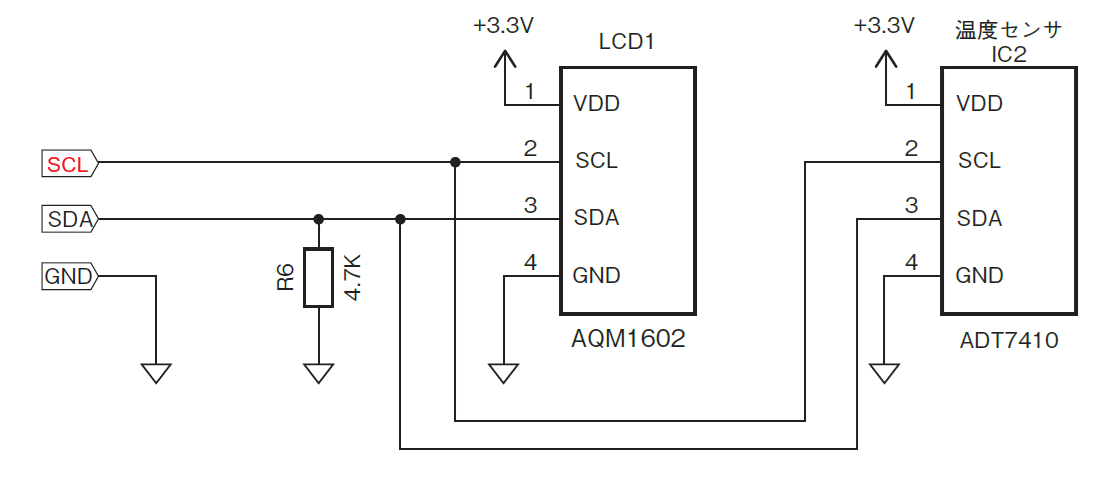
Chapter 7 I2Cバスを使う
7.1 本章で準備するもの
7.2 I2Cバスとは
7.3 ラズパイのI2Cバス
7.4 LCDとは
7.5 LCD AQM1602の仕様と内部レジスタ
7.6 LCDを制御する関数
7.7 LCDに文字や数字を表示させる
7.8 ライブラリファイルの作成
7.9 センサで温度を測る
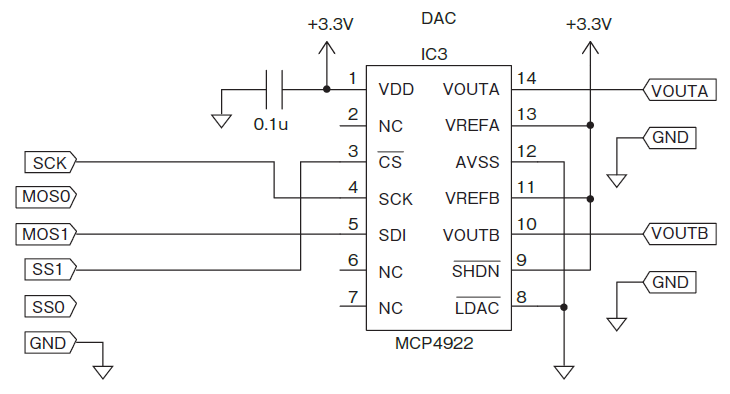
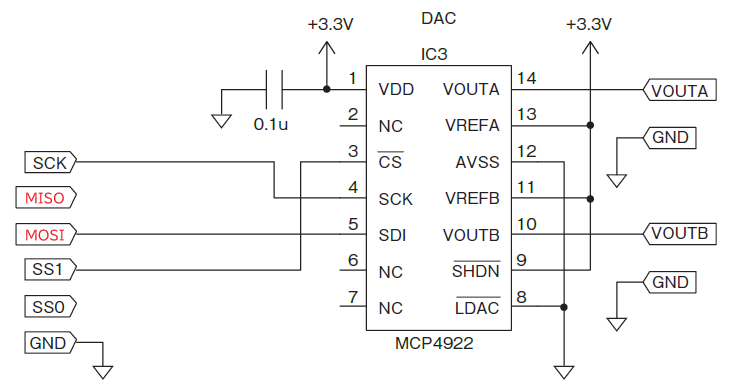
Chapter 8 SPIバスを使う
8.1 本章で準備するもの
8.2 SPIバスとは
8.3 ラズパイのSPIバス
8.4 D/Aコンバータとは
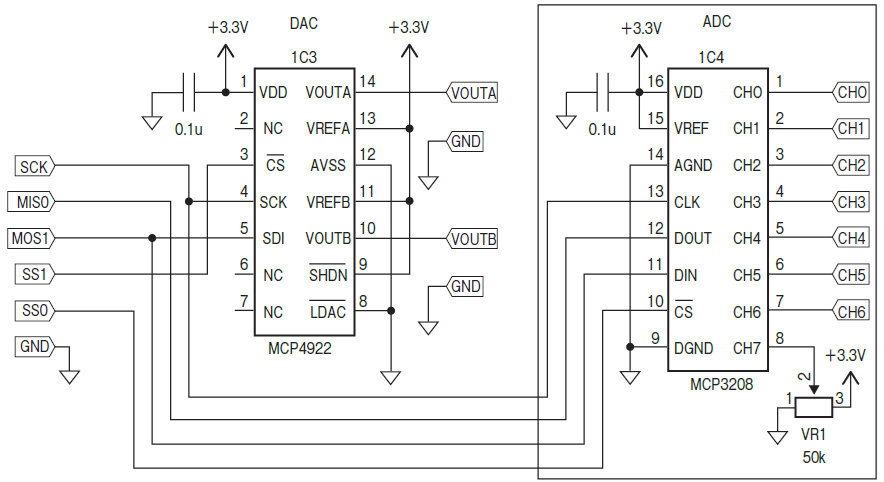
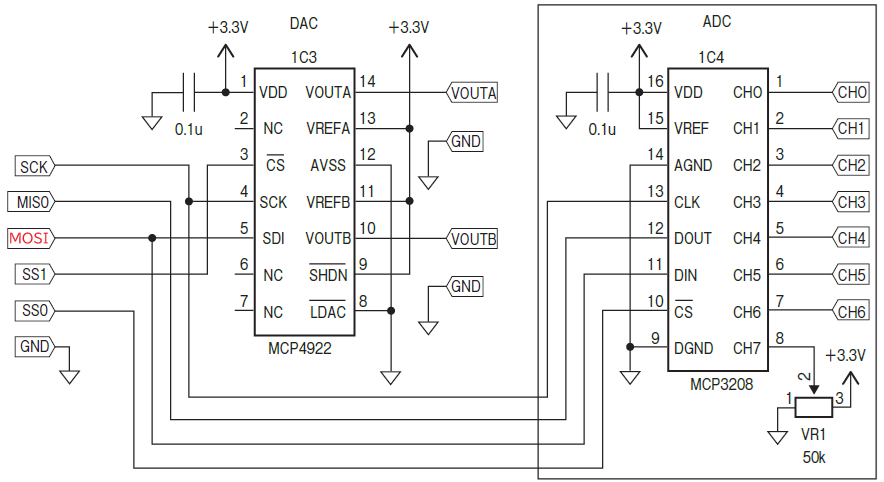
8.5 DAC MCP4922の仕様
8.6 DACから電圧を出力させる
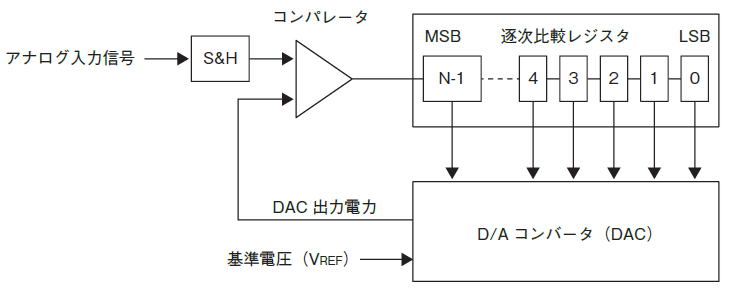
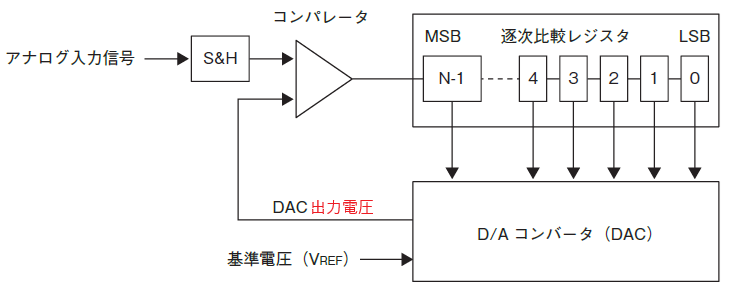
8.7 A/Dコンバータとは
8.8 ADC MCP3208の仕様
8.9 ADCを使用して電圧を測定する
Chapter 9 Piカメラで撮影する
9.1 本章で準備するもの
9.2 イメージセンサとは
9.3 Piカメラ3の概要
9.4 カメラアプリlibcameraとは
9.5 人を検知したらPiカメラで撮影する
Chapter 10 自走ロボットを製作する
10.1 本章で準備するもの
10.2 自走ロボットの概要
10.3 自走ロボットの仕組み
10.4 ライン検出基板の製作
10.5 メインボードの製作
10.6 シャーシの組み立て
10.7 自走ロボットのテスト走行
10.8 自走ロボットの組み立て
Chapter 11 自走ロボットを制御する(基礎編)
11.1 基礎編について
11.2 VNCの設定
11.3 LEDを点滅させる
11.4 LCDに変数の値を表示させる
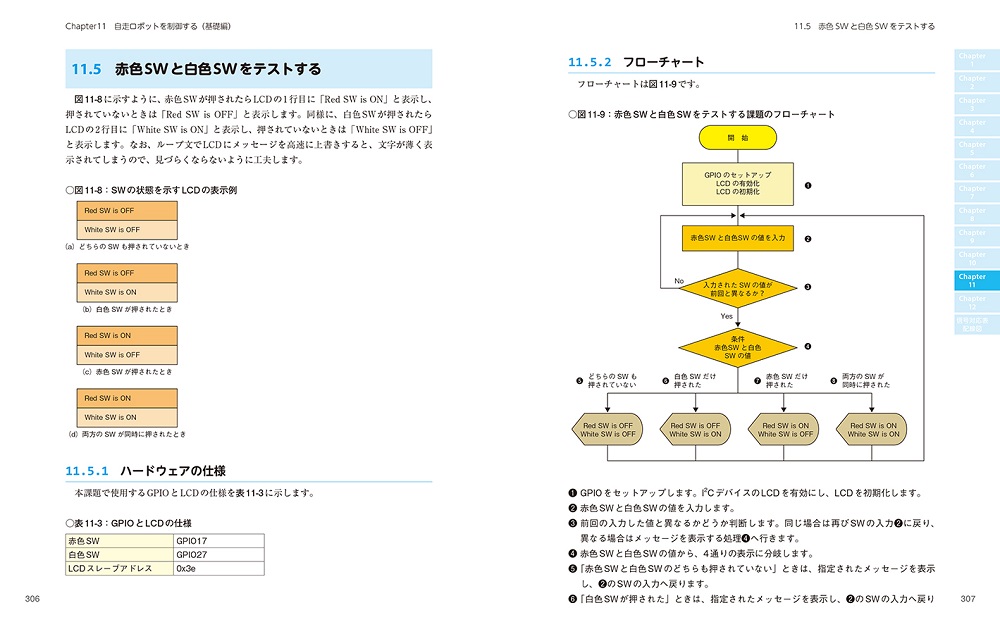
11.5 赤色SWと白色SWをテストする
11.6 圧電サウンダを鳴らす
11.7 フォトセンサの信号を表示する
11.8 DCモータを回転させる
11.9 DCモータを正転,逆転,ストップさせる
11.10 シャットダウンボタンを追加する
11.11 緩やかなラインをトレースする
Chapter 12 自走ロボットを制御する(応用編)
12.1 応用編について
12.2 RCサーボモータの位置決めをする
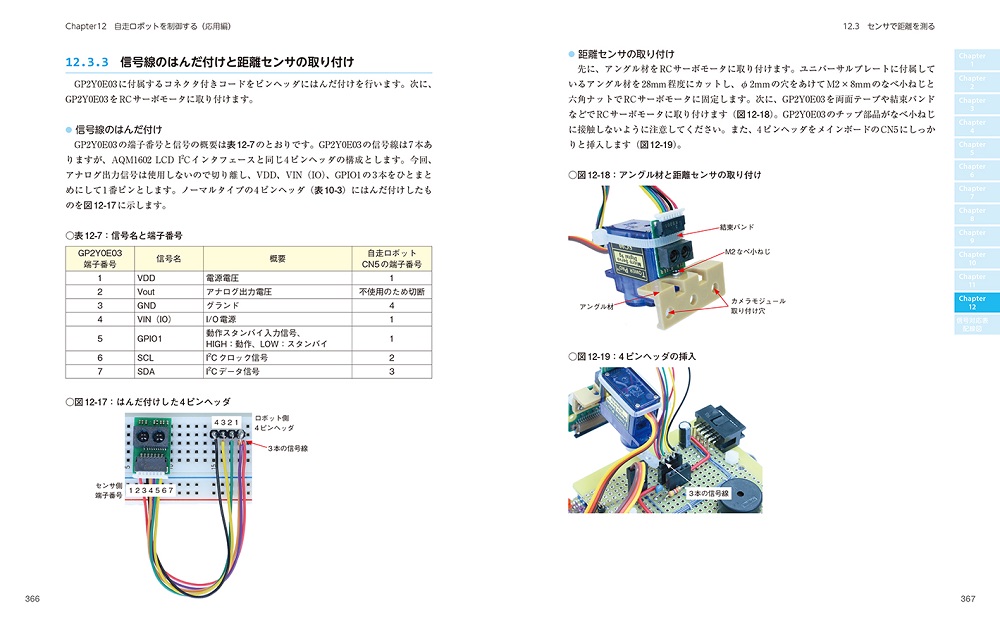
12.3 センサで距離を測る
12.4 障害物を検出して自動停止して撮影する
サポート
ダウンロード
サンプルソースコードダウンロード
本書のChapter 4以降で作成するサンプルソースコードの完成版ファイルをダウンロードできます。ZIP形式で圧縮されています。本書を使った学習の際にご利用ください。
6-Pwm01.cと11-Motor.cが変更されました。詳しくは正誤表をご確認ください。
ダウンロード
MyApp2.zip
拡張コネクタガイドについて
本書の「拡張コネクタガイド」をダウンロードできます。解凍してできた
PDFファイルを「実際のサイズ」で印刷してご利用ください。
ダウンロード
connectorguide.zip(約1.4MB) 補足情報
次のWebサイトでも補足情報や自走ロボットの動画などをご確認いただけます。
正誤表
本書の以下の部分に誤りがありました。ここに訂正するとともに,
P.259 表10-2:上から14行目の「名称」と「参考品」
誤
多回転半固定ボリューム横型1kΩ
正
多回転半固定ボリューム横型10kΩ 115466
P.156 リスト6-2(6-Pwm01.c)上から3行目
P.169 下から2行目
誤
スレッドを起動させるタイミングがOSやlgpioライブラリに依存しているためです。
正
主な要因は半周期を小数点以下3桁に丸めた誤差です。「0.166667」とすることで誤差は小さくなります。
P.188 図7-17
誤
正
P.199 図7-22
誤
正
P.217 図8-8
誤
正
P.223 図8-13
誤
正
P.232 図8-22
誤
正
P.272 見出し
誤
10.4.6 検査回路の検査
正
10.4.6 ライン検出基板 の検査
P.333 リスト11-6(11-Motor.c)19行目,
P.333 リスト11-6(11-Motor.c)35行目,
P.337 リスト11-7(11-Shutdown.c)19-20行目
誤
hndLcd = lgI2cOpen(I2C_BUS,LCD_ADR,0);
LcdSetup(hndLcd);正
(2行を削除)
P.354 表12-1:SG-90の主な仕様
誤
動作電圧 4.8V~5V
正
動作電圧 3.3V~6V