概要
本当に必要なモーターの専門知識を的確に提供することを目的とした,今までにないモーターの技術専門書である。
現代は,高度な進化を遂げたメカトロニクス社会。
メカトロニクスを駆使する上で必須知識の一つが,モーターである。
ほとんどのメカトロニクス制御はモーター技術で行われている,といっても過言ではないだろう。
高度成長期の時代,技術者は大学を卒業してそのまま実務に就くこともありえた。
しかし,現代の高度工業社会では,工学部のカリキュラムだけでモーターを理解するのは難しい。
その一方で,メカトロニクス製品開発競争は世界的に激化。
モーター知識をそなえた人材のフォローアップは待ったなしの状況である。
そうしたニーズに応えるべく誕生したのが,本書『メカトロニクスのモーター技術』。
メカトロニクスの最前線で50年以上活躍を続ける著者が,「モーター技術において本当に必要な知識とな何なのか?」を見つめ直し,内容を徹底吟味。
「豊富でわかりやすいイラスト」と「懇切丁寧な説明」で,読者の理解が進むように最大限の創意工夫をほどこした。
さらに,従来の技術書で語られなかった知識も盛り込んでいるので,モーター知識をより深化させる一助にもなるだろう。
one and onlyのモータ教科書として,一度手にとっていただければ幸甚である。
こんな方におすすめ
- モーター技術を必要とするメカトロニクスのエンジニア
- 電気工学系,メカトロニクス系の大学生&大学院生
- モーターを使用する技術営業の方
目次
Chapter 1 モータユビキタス時代へ
- 1.1 モータは身近な存在
- 1.2 モータ時代の夜明け前
- 1.3 エレクトロニクス時代のモータ
- 1.4 ブラシレスモータの用途拡大
- 1.5 ステッピングモータ
- 1.6 モータユビキタス時代の技術的課題
Chapter 2 DCモータの基本構造と機能
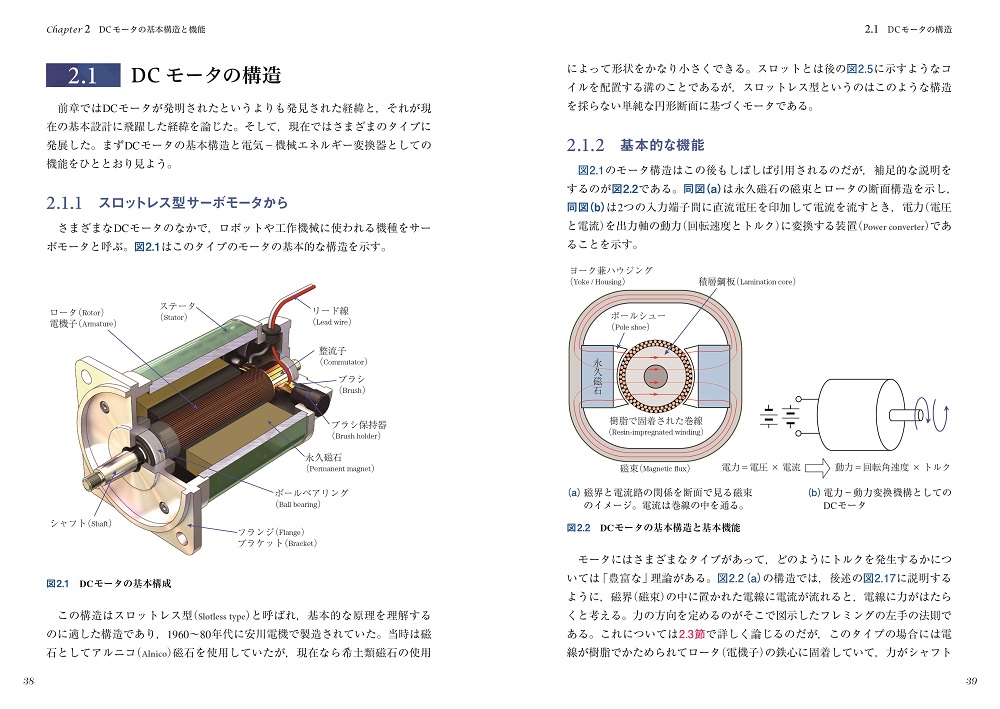
- 2.1 DCモータの構造
- 2.2 コンパクトな最新構造に潜む電磁現象
- 2.3 トルクの発生とフレミングの左手の法則
- 2.4 発電機のはたらきとフレミングの右手の法則
- 2.5 トルクと逆起電力定数の関係
- 2.6 トルクと速度の関係
- 2.7 回生モード
- 2.8 制動機モード
- 2.9 3つの動作モード
Chapter 3 モータ構造とトルク理論
- 3.1 電磁石界磁方式から
- 3.2 永久磁石界磁の場合
- 3.3 永久磁石の種類
- 3.4 永久磁石方式での空隙の磁界生成
- 3.5 電機子反作用とそれに伴う不可逆減磁
- 3.6 面力表現とロータ体積によるトルク式
- 3.7 ティアのトルク理論
- 3.8 損失の種類とトルクむら
- 3.9 応答性に関する事柄
Chapter 4 等価回路とパラメータ測定
- 4.1 等価回路とパラメータ
- 4.2 パラメータの測定
- 4.3 定常特性の描画
- 4.4 電気・機械エネルギー変換
- 4.5 等価回路を使った動的挙動の解析
- 4.6 減速機構やリニアへの変換の扱い
- 4.7 コギングトルク
- 4.8 ダイナミック測定
Chapter 5 DCモータを使う速度と位置の制御
- 5.1 モータの回転の制御へ
- 5.2 印加電圧の制御
- 5.3 伝統的な速度制御
- 5.4 ダイナミック応答と不安定現象の抑制
- 5.5 位置の制御
- 5.6 制御系を安定にするための数学的ツール ―線形理論と非線形要素―
- 5.7 過電流検出による簡単な位置制御
- 5.8 本章に続く勉強の指針
Chapter 6 ブラシレスDCモータ
- 6.1 ブラシ付きとの対応関係と相違
- 6.2 導通角と基本結線
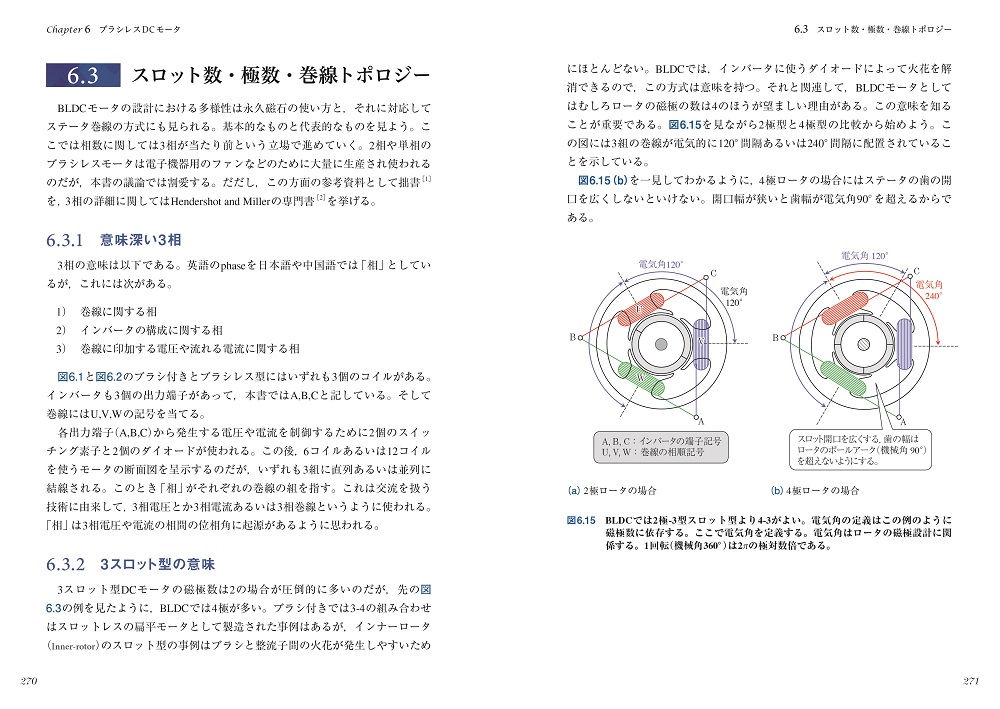
- 6.3 スロット数・極数・巻線トポロジー
- 6.4 種々の巻線と結線
- 6.5 位置センサ
- 6.6 駆動回路と運転方式
- 6.7 等価DCモータ
Chapter 7 ブラシレスDCモータの詳しい扱い方
- 7.1 Δ結線からY結線へ
- 7.2 高調波の影響
- 7.3 インバータを含む交流モータとしての計算
- 7.4 ダイオードの役割とi-v特性
- 7.5 運動方程式の扱いかた
- 7.6 計算例
- 7.7 センサレス駆動
Chapter 8 ベクトル制御のペンタゴン理論
- 8.1 他励DCモータを出発点とする二軸理論
- 8.2 リラクタンスモータ
- 8.3 永久磁石と凸極の併用とIPM
- 8.4 電圧方程式導出の準備
- 8.5 凸極構造を考慮した電圧方程式
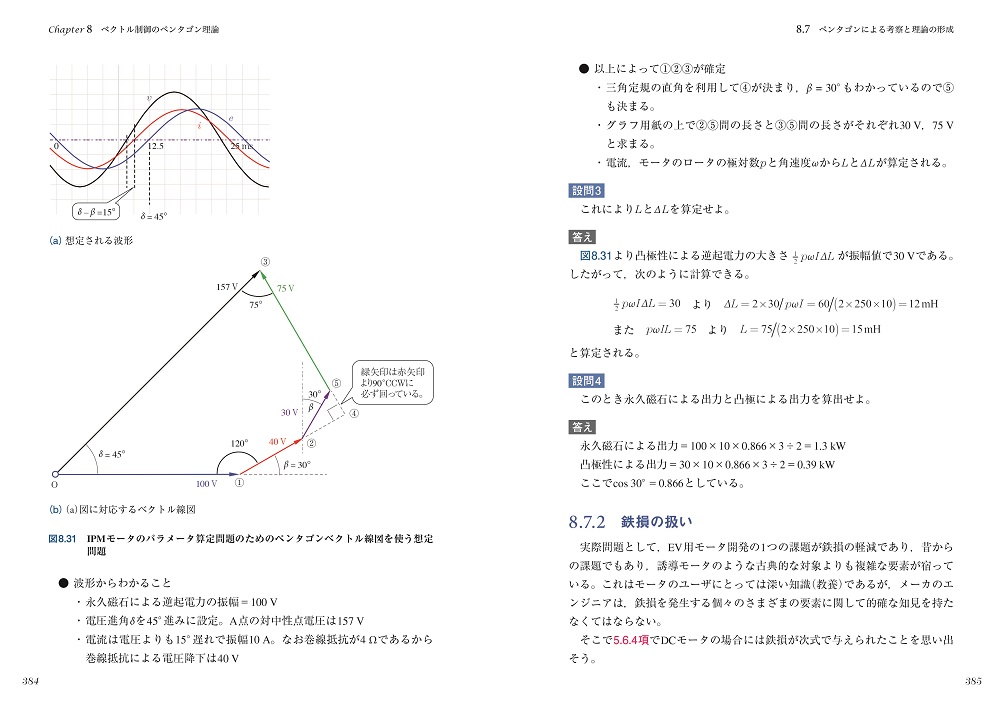
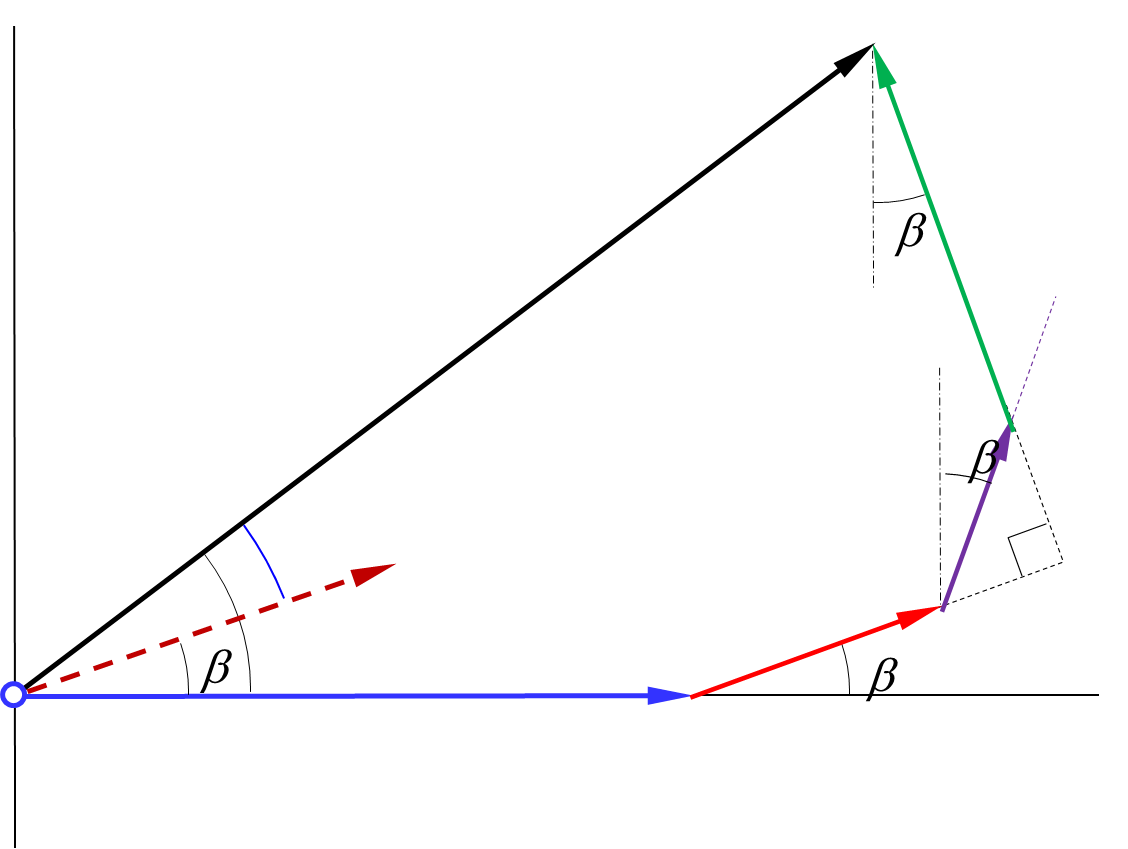
- 8.6 ベクトル線図での考察と解析
- 8.7 ペンタゴンによる考察と理論の形成
- 8.8 速度範囲の拡大に関する事柄
Chapter 9 体格と選定 395
- 9.1 はじめに:考え方の提案
- 9.2 モータの性能指数 ―永久磁石の減磁限界―
- 9.3 そのほかの要素
- 9.4 温度上昇と冷却
- 9.5 モータの選定
- 9.6 モータと負荷との結合
- 9.7 減速機による締結
- 9.8 モータ利用の展望
Chapter 10 電気力学の起源から行方
- 10.1 電気力学の起源からモータの発見的発明まで
- 10.2 1870年代の胎動
- 10.3 マクスウェルの登場
- 10.4 アインシュタインの電気力学
- 10.5 電気・機械エネルギー変換
- 10.6 ヒステリシス現象に注目した導出
- 10.7 発想の飛躍―すべてのモータへ適用
- 10.8 次世代の工学へのさらなる考察
- 10.9 次のステップのために
サポート
ダウンロード
電子版用ダウンロード
電子版用に,付録PDFを以下から入手できます。ダウンロードには電子版本紙に掲載されているIDとパスワードが必要です。
正誤表
『メカトロニクスのモーター技術』初版第1~2刷(2刷は2023年3月14日発行)に,以下の誤りがありました。
読者の皆様ならびに関係者の皆様にご迷惑をおかけしましたことを,深くお詫び申し上げます。
P.13 1.7から3行目
P.70 下から8行目
P.85 図3.1
P.102 3.11から3行目
P.103 上から10, 11, 13行目
P.120 下から2行目
P.125 式(3.25)
P.133 図3.25のキャプション3行目
P.158 下から3行目
P.222 4行目
P.242 最下行
| 誤 |
0.3 A s rad-1 |
|---|
| 正 |
0.03 A s rad-1
|
|---|
P.310 式 (7.5)
| 誤 |
式(7.5)
式(7.6) |
|---|
| 正 |
A-B=cos(5θ)-cos( 5θ-5γ)=√3 sin(5(θ+γ/2))
A-B=cos(7θ)-cos( 7θ-7γ)=-√3 sin(7(θ-γ/2)) |
|---|
P.317 図7.11
| 誤 |
各相間の自己インダクタンス |
|---|
| 正 |
各相の自己インダクタンス |
|---|
「間」が不要です。
P.332 下から5行目
| 誤 |
(4)に対応して進角を設定していない |
|---|
| 正 |
進角を設定していない |
|---|
「(4)に対応して」が不要です。
P.344 6行目,下から3行目
P.364 図8.16
「と電流」が不要です。
P.372 図8.19
| 誤 |
赤褐色のべクトル |
|---|
| 正 |
下図のように破線にする
|
|---|
P.386 式(8.29)
| 誤 |
VI cos(β-δ) |
|---|
| 正 |
2VI cos(β-δ) |
|---|
P.514 参考資料9